L'idea è quella di poter avere un modulo, un braccio in questo caso, pilotato da diversi motori per svolgere le più svariate funzioni, sempre mantenendo la compatibilità con i diversi moduli ( shell ) Arduino e Raspberry Pi.
In questa prima fase, il montaggio, reperiamo tutto il necessario per il controllo e la connessione del braccio robotico.

Per la base del braccio ho trovato molto interessante il progetto open source "MeArm", recuperabile a questo indirizzo : http://goo.gl/sxX13z
Scaricato il disegno, si può decidere di stamparlo in 3D oppure tagliarlo su d'un foglio di plexiglas con un taglio laser.
Una volta stampato/tagliato tutti i componenti , basterà utilizzare questa guida passo passo per il montaggio: http://www.instructables.com/id/Pocket-Sized-Robot-Arm-meArm-V04/
Per quanto riguarda i motori il progetto è sagomato con i motori tipo SERVO con queste dimensioni: http://goo.gl/j3gDnt
Non importa la marca del servo, la potenza o altro, conta solo la dimensione compatibile con il progetto.
Per le viti, attenersi alla guida passo passo; alcune di queste M3 non sono di comune uso, meglio trovare un rivenditore specializzato in viti vicino a casa propria .
Scaricato il disegno, si può decidere di stamparlo in 3D oppure tagliarlo su d'un foglio di plexiglas con un taglio laser.
Una volta stampato/tagliato tutti i componenti , basterà utilizzare questa guida passo passo per il montaggio: http://www.instructables.com/id/Pocket-Sized-Robot-Arm-meArm-V04/
Per quanto riguarda i motori il progetto è sagomato con i motori tipo SERVO con queste dimensioni: http://goo.gl/j3gDnt
Non importa la marca del servo, la potenza o altro, conta solo la dimensione compatibile con il progetto.
Per le viti, attenersi alla guida passo passo; alcune di queste M3 non sono di comune uso, meglio trovare un rivenditore specializzato in viti vicino a casa propria .
Connessione e controllo
Una volta assemblato il tutto , ci troviamo con 4motori da comandare in PWM, con un numero di porte da occupare su Arduino considerevolmente alto. Analizziamo un modo molto più elegante e funzionale per il controllo dei motori.
La mia soluzione è l'utilizzo d'un controller servo chiamato Maestro Micro: https://www.pololu.com/product/1350
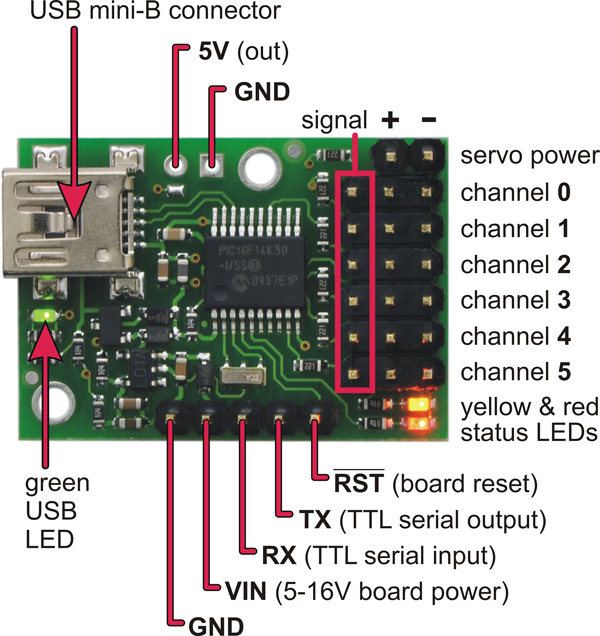
Questo controller è comodo per controllare servo di diversa dimensione ed in numero elevato, oltre ad averne una miglior gestione. Per comandare questo controller sono necessari solo due pin d'Arduino.
Per controllare il corretto funzionamento del controller utilizzare questa libreria completa d'ogni funzione disponibile : https://github.com/pololu/maestro-arduino
Prossimamente scriverò qualche articolo con qualche riga di codice per comprendere meglio l'interfaccia tra controller e SERVO.
Questo controller è comodo per controllare servo di diversa dimensione ed in numero elevato, oltre ad averne una miglior gestione. Per comandare questo controller sono necessari solo due pin d'Arduino.
Per controllare il corretto funzionamento del controller utilizzare questa libreria completa d'ogni funzione disponibile : https://github.com/pololu/maestro-arduino
Prossimamente scriverò qualche articolo con qualche riga di codice per comprendere meglio l'interfaccia tra controller e SERVO.
Nessun commento:
Posta un commento